Model predictive control (MPC) has shown great potential in improving the building operation performance and saving energy. However, its actual implementation is restricted by the high configuration cost. Control-oriented model is the cornerstone of MPC and the most challenging part. Due to the paucity of a systematic understanding, it is also hard to estimate the efforts required to obtain the model. Therefore, this study aims at improving the scalability of MPC by addressing modeling-related issues and establishing an automated framework.
While many past studies demonstrated the usefulness of MPC through simulation and experiments, more attention is required for quantifiable relationships between data requirement, model performance, and control performance. The data used to obtain the model and implement control is essential for the ultimate performance. However, data availability and quality vary among different buildings. Therefore, an important question for scalability is what data is necessary and/or desired. On the other hand, it is unclear how the predictive capability of control-oriented models affects the control performance. The answer to this question involves a model performance evaluation approach, which tests not just the predictive accuracy, and series of experiments to quantify the relationships.
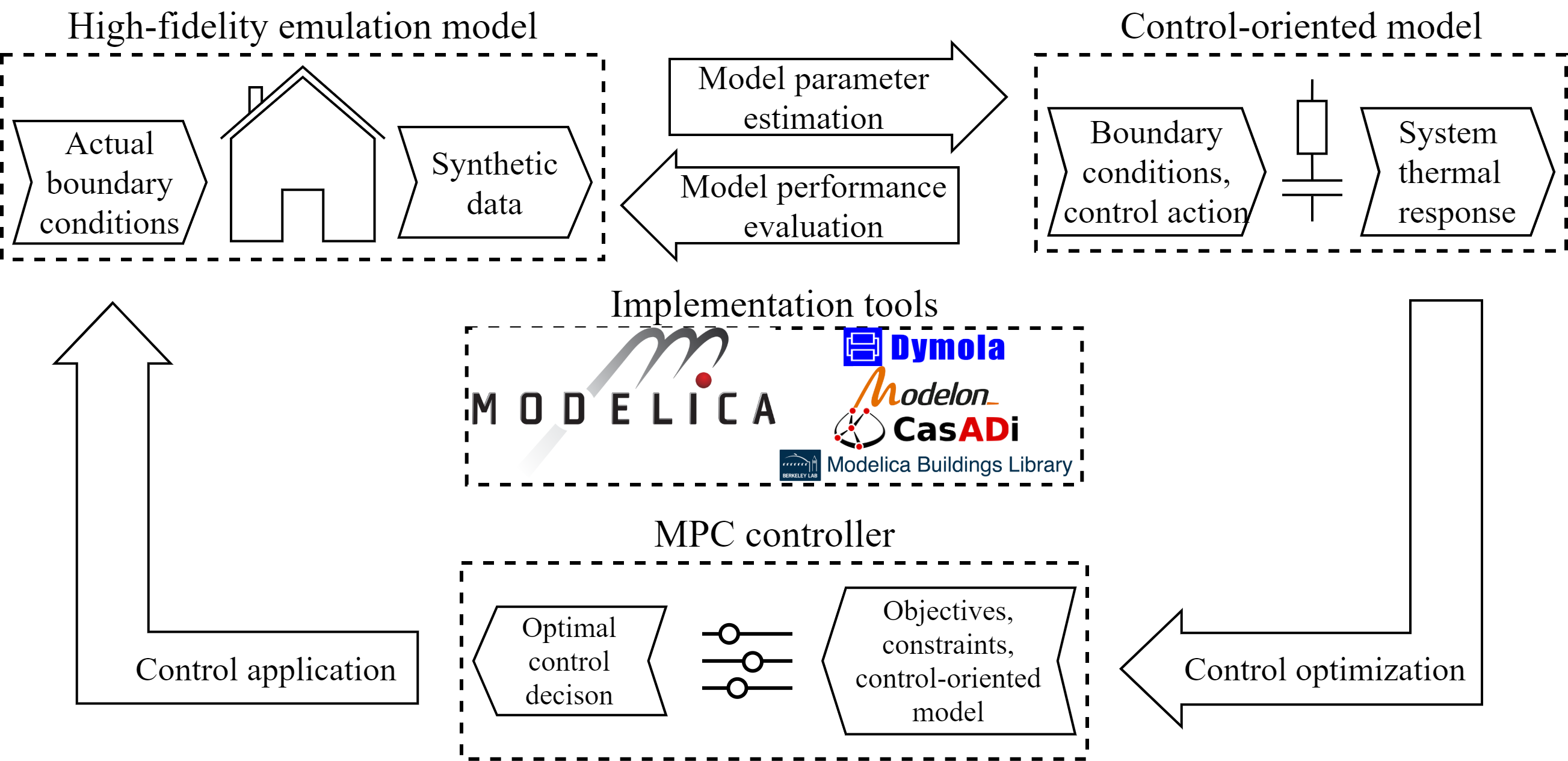
Virtual testbeds with single and multi-zone emulators are implemented to address the questions. Different data availability conditions are designed to obtain alternative control-oriented models. All alternatives are comprehensively evaluated in terms of prediction and control performance. Thereby, quantitative relationships between data requirement, model performance, and control performance are established. The virtual experiments are partially duplicated in an actual testbed for verification. Subsequently, a MPC framework is proposed to automatically configure and evaluate the models based on data availabilities and control purposes. The framework is showcased in actual buildings.